新版航空与卫星影像自动处理软件MASI Version 6.3的主要特色
导读:本文主体包含三个部分内容。第一部分为MASI Version 6.3版相比6.2版增加的功能和改进的内容;第二部分为MASI Version 6.3软件主要功能和应用简介;第三部分为归纳总结的MASI Version 6.3软件的6个主要特色。6个主要特色为本文重点,分别为:(1)卫星影像处理具备面向不同应用的三种定向平差方法及后续处理流程;(2)多种自动化处理方法与策略;(3)软件具备多个层级并行处理能力;(4)采用的多视立体匹配和多视融合技术;(5)高密度、高精度DSM生成及新型应用;(6)以点集中管理为特色的点查看、点量测通用交互式工具nViews。阅读本文大概需要15分钟。
继2023年9月发布MASI Version 6.2版,经过近一年持续改进与提升,北京空视信息技术有限公司于2024年6月发布其最新版航空与卫星影像自动处理软件MASI Version 6.3。该版本相比上一版本主要增加功能和改进内容如下:
(1)进一步改进和完善卫星影像定向平差功能。针对卫星影像定向平差,形成了三类完整的方法体系,也即卫星立体影像区域网平差、卫星平面影像区域网平差、与已有正射影像自动匹配提取控制点的定向平差。该三类定向方法可满足卫星影像大多情况下定向平差需求。该三类定向平差方法具备连接点自动匹配及全自动无控定向、粗差剔除和有控精确定向功能。其中,平差计算进一步提高计算效率,并减少了内存消耗。
(2)进一步提高点查看、点量测通用工具nViews.exe的易用性和操作效率。nViews.exe工具可用于多重连接点的检查、查看、人工量测、自动量测,并可进行控制点导入和量测等。相比上一版本,本版本在人工像点量测、点分布查看、大量影像查看操作等提高了操作效率,同时增加了根据控制点地面坐标自动推断像点位置功能、在指定区域自动匹配新的连接点功能、根据设置的重数(连接点的视数)显示点的分布等功能。该工具可用于立体区域网和平面区域网匹配的点的查看、检查和量测。
(3)添加了用于国产资源系列、高分系列卫星同传感器同拍摄角度获取的L1A级(SC级,系统校正级)全色和多光谱影像全自动配准与影像融合流程化批量处理可视化程序autoAlignBRForm.exe。在该功能的支持下,改进了卫星影像处理流程,针对多数卫星相同角度下拍摄全色和多光谱影像情况,在流程开始时使用同一角度获取的全色和多光谱进行影像融合,然后再使用具有色彩的融合影像(其定向参数同全色影像)进行正射纠正、实景三维重建等步骤,避免了分辨率低的多光谱影像参与定向平差。
(4)增加多个其它功能或进行了更新。多个具备镶嵌功能程序添加了新的选项,用户可选择是否羽化镶嵌线;地形滤波功能增加了只对感兴趣范围进行滤波选项。添加了拟合椭圆中心点工具和拟合两条直线并求其交叉点工具。
经上述更新后的最新版MASI Version 6.3具有航空影像、ADS影像、卫星影像和无人机影像处理多个主要处理步骤。针对以上传感器,具有全自动高密度DSM(包括点云)生成、实景三维建模、正射影像生成、自动镶嵌、镶嵌线编辑、色彩平差功能(匀色)、DSM自动转换成DEM(DSM减去DEM即为房高、树高提取)、高度变化自动发现、体积计算、建筑物属性(楼高、楼层数、楼中心位置、地面面积和建筑面积等)自动提取、影像显示、DSM/DEM交互式编辑、多边形采集等功能。尤其针对卫星影像处理,最新版MASI Version 6.3软件更具备分别满足不同需求的三种处理流程(详情见后述说明),除上述功能外还具备连接点自动匹配和多种定向平差方法、交互式匹配点检查和点量测、控制点量测与平差、影像融合、多项式纠正等功能。
最新版MASI Version 6.3支持三线阵推扫式航空相机、所有的框幅式航空数码相机和经过检校的民用相机,常用的航空相机如ADS40/80/100,DMC I/II/III, UCD, UCX, UltraCam Falcon, UltraCam
Eagle, UltraCam Eagle Mark2/Mark 3等系列,支持国产SWDC双拼、四拼相机;支持RCD 30、哈苏相机、飞思相机等经检校的中画幅相机,支持尼康、佳能、索尼等各种无人机平台采用的相机。支持常见的商业卫星传感器和国产卫星传感器,如Worldiew-1/2/3/4, QuickBird, Ikonos, GeoEye,
Pleiades 1A/1B, Pleiades Neo, SPOT 6/7、资源三号01/02/03、资源系列、高景系列、四维高景系列光学卫星(高分多模)、国产高分系列、高分七号、天绘系列光学卫星、北京系列、吉林一号等。
使用MASI Version 6.3软件可加工生成密集点云、DSM、真实色彩纹理的三维模型(Mesh模型)、DEM, nDSM, 正射影像、全色和多光谱融合影像、镶嵌影像、高度变化图、具备建筑物属性的矢量文件、体积数值等。该软件可应用于以下场景:(1)测绘产品制作(点云、DSM, DEM,(真)正射影像、融合影像等);(2)卫星影像多期配准与遥感监测;(3)建筑物和树高度提取、白模建模;(4)实景三维建模;(5)土石方、地表矿产资源开采量、地面物体(货物、干散货、垃圾、木头、草垛等)堆积量等估算、蓄水量、打击评估;(6)房屋保险、商业和军事情报收集等;(7)新建、超建、违建、拆除建筑物的自动发现及高度精确提取(通过高度变化自动发现建筑物新建、超建、违建、拆除等变化情况);(8)新城、居住小区、大型工程建设进度等各种高度发生变化的监测应用;(9)征地和拆迁预算、工作量估算等;(10)建筑小区容积率计算;等等。
最新版MASI Version 6.3软件具有以下特色:
(1)卫星影像处理具备面向不同应用的三种定向平差方法及后续处理流程
MASI Version 6.3软件实现了三种处理流程,可分别对立体影像和平面影像进行处理,各处理流程如图1、图3和图6所示。图1流程为立体影像(可单个立体或立体区域网)处理流程,图3和图6均可对平面影像进行处理,但其面向的应用稍有不同,图3中流程(用于平面区域网处理)主要用于大范围正射镶嵌图制作,图6中流程主要用于多期遥感影像的配准及各类多期监测类应用。图3与图6流程依赖的数据也稍有不同,图6流程需要已有正射影像作为输入,而图3流程则不需要。
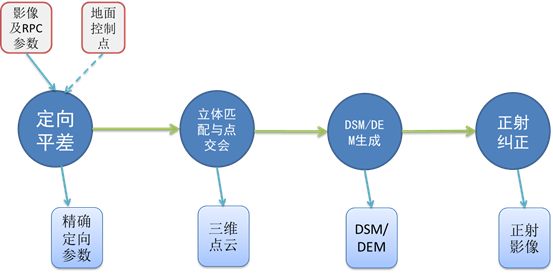
图1 立体区域网平差及后续处理流程
以立体影像(或立体区域网)定向平差为开始步骤的处理流程如图1所示,该种定向方式可用于地形信息提取(DSM/DEM产品制作)、房/树高提取、高度变化发现、体积计算、三维建模、正射影像制作等。可用于资源三号、高分七号、敏捷星同轨立体影像等卫星影像的处理。例如,图2为高分七号双线阵立体影像处理得到数字表面模型(DSM)产品。
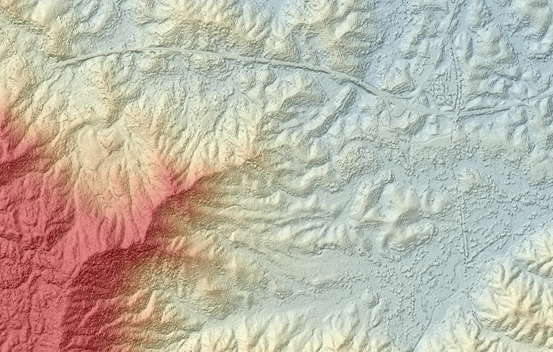
图2 高分七号双线阵立体影像经过图1处理流程得到的DSM,网格间距:1米
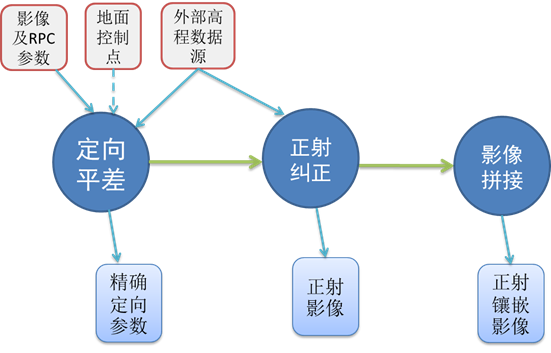
图3 平面区域网平差及后续处理流程
以平面影像定向平差为开始步骤的处理流程如图3所示,该种定向方式可用于大范围单视角正视影像的正射纠正与镶嵌。可用于高分一号、高分二号、高分六号、中巴资源卫星、吉林一号等卫星影像的处理。图4为多个条带的单视角平面影像经过图3全自动处理流程得到的镶嵌图,实现了无缝拼接(如图5所示)和自动色彩调整。
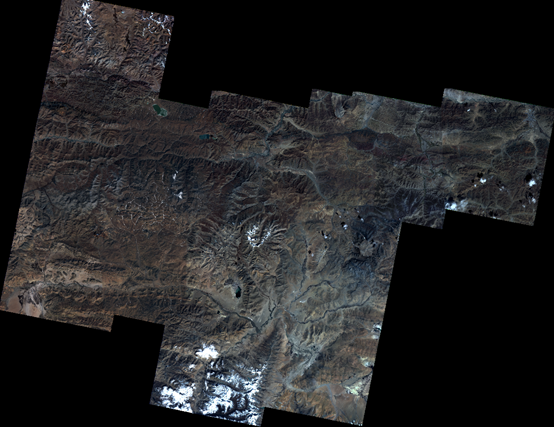
图4 大范围单视角正视影像的正射纠正与镶嵌
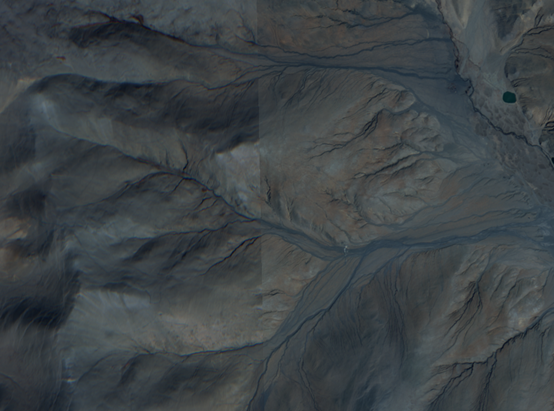
图5 图4镶嵌图中条带之间实现无缝拼接
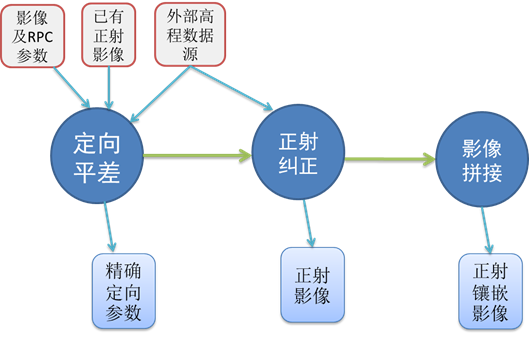
图6 与已有正射影像匹配自动提取控制点的定向平差及后续处理流程
与正射影像匹配自动提取控制点进行定向及其后续流程如图6所示,该种定向方式需要已有正射影像用作参考,可用于多期遥感影像的配准、多期影像监测类应用。可用于高分一号、高分二号、高分六号、中巴资源卫星等卫星影像的处理。MASI v6.3软件中实现了一套高度自动化的集影像定向,正射纠正和配准于一体的处理方法与软件工具,无需人工选点,只一次变换,可同时得到定向,正射纠正和配准成果。非常适合遥感监测等应用(遥感监测在国土等行业应用过程中,很重要的一个步骤是多期影像的精确对准)。图7为通过图6流程在待定向影像上自动提取的均匀分布的控制点,使用均匀分布的控制点进行定向平差(含粗差剔除)得到定向平差结果,使用定向平差结果对待定向影像进行正射纠正,得到如图8所示的正射影像,得到的正射影像与用作参考的正射影像无缝对准,如图9所示;图9为卷帘显示,左侧为待定向影像处理得到的正射影像,右侧为用作参考的正射影像,两影像精确配准,可用于多期遥感影像的配准、多期影像监测类应用。
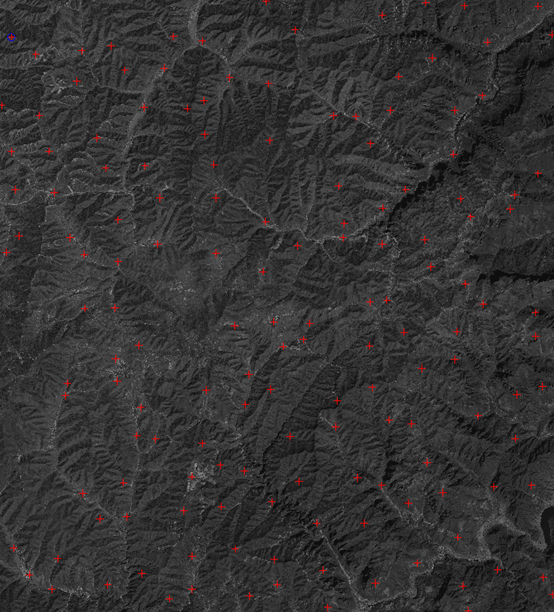
图7 与正射影像匹配提取的均匀分布的控制点
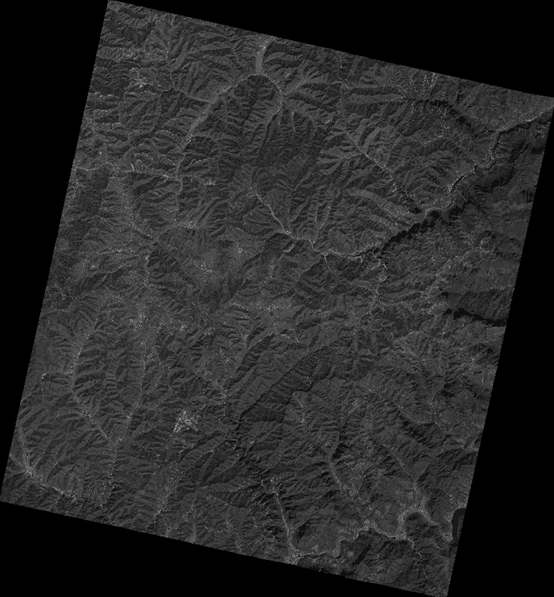
图8 使用定向平差结果对待定向影像进行正射纠正
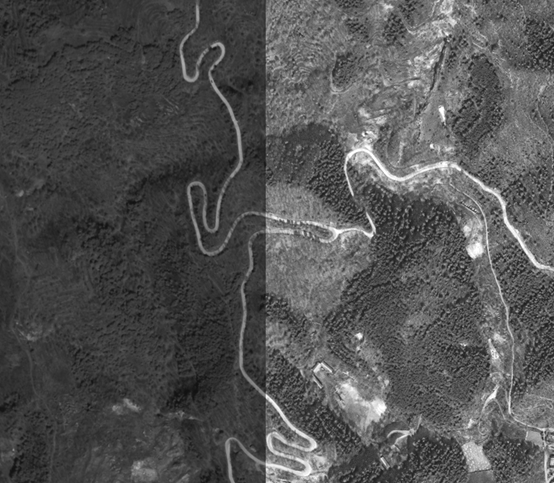
图9 待定向影像经过正射纠正后的结果影像与用作参考的正射影像无缝对准(左为待定向影像的正射影像,右为用作参考的正射影像)
(2)多种自动化处理方法与策略
主要自动处理方法和策略包括:
(a)设计和实现程序模块时将处理逻辑程序和图形操作界面程序完全分离。处理逻辑程序实现为命令行程序,命令行程序支持批处理操作,用户可通过命令行和批处理模式实现自动化的流水线处理,如图10所示,提高了处理效率和自动化水平。同时部分程序可自动生成批处理文件,批处理文件包含多个命令行,描述批量处理流程,调用生成的该批处理文件即为执行处理流程。例如,adsDSMForm.exe程序可自动生成处理整个区域网内所有ADS影像的批处理命令,相应的配置文件设置好之后,只需一键操作即可进行整个区域网内所有像对的立体匹配处理。
(b)处理参数预先保存至配置文件。处理流程开始前将处理参数保存为以.conf为扩展名的配置文件,该文件采用XML格式,配置文件中存有用户设置的各配置选项的取值。处理过程中可直接从预先保存的配置文件读取参数,不用中断程序等待用户进行参数赋值,实现程序自动化处理。同时,下次使用时可直接从配置文件自动载入处理参数,具备类似处理模板功效,即可保存每个处理任务所有参数又可减少人工操作。
(c)粗差剔除策略。连接点匹配、平差计算、立体匹配等主要步骤具备粗差剔除功能,自动剔除粗差既实现了自动化处理又保障了处理结果质量。
(d)多种提高特征点匹配可靠性和正确率的策略。如均匀分布策略、两次匹配交叉检验、删除边缘不可靠点等。
(e)提供了非法输入的报错机制,输出日志信息等。软件具备完善的运行日志系统,相关处理命令、输入参数、输出信息和错误信息均会保存至日志文件,方便用户对各处理步骤进行后续检查、追溯、问题排查和问题定位。问题排查和发现有助于后续处理的自动化。
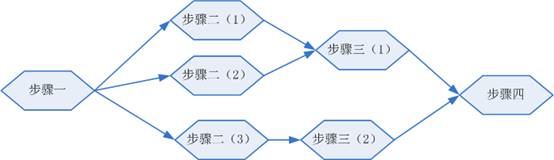
图10 具有多个步骤的自动化处理流程
(3)软件具备多个层级并行处理能力
软件具备多项高性能处理技术,多个计算需求较大的程序模块具备多机分布式处理、基于消息传递(MPI)的多进程并行处理、基于OpenMP的多线程并行处理中的一种或者多种,多个层级并行处理提高处理效率并充分发挥目前主流多核计算机的运算能力。
图11为ADS航空三线阵影像立体匹配和DSM生成步骤中采用的高性能计算技术,图12和图13分别为卫星影像立体匹配步骤和正射纠正步骤采用的高性能计算技术,框幅式航空影像和无人机影像立体匹配模块和正射纠正模块、各传感器其它模块采用的高性能计算技术请参考MASI软件用户使用手册。多机分布式处理时影像数据可以存储在网络存储环境下,如图14模式,但要求网络存储性能高且存储与计算节点通过高速网络进行互联。
图15为单机平台下一标准景高分七号影像立体匹配生成DSM和正射纠正所用时间。
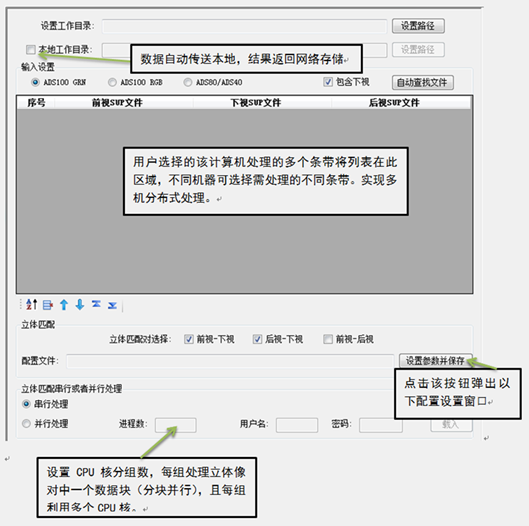
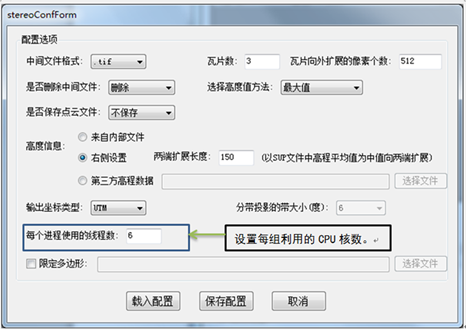
图11 ADS航空三线阵影像立体匹配和DSM生成步骤中高性能计算
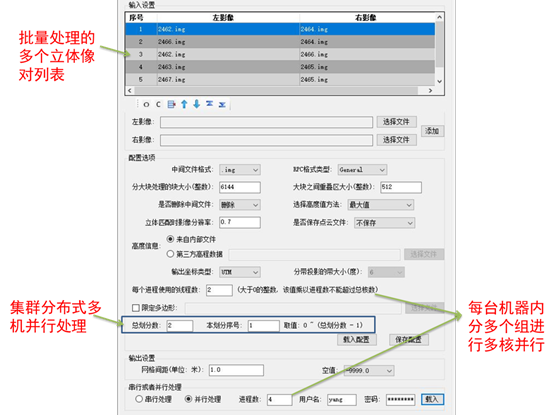
图12 卫星影像立体匹配和DSM生成步骤中高性能计算与批量处理
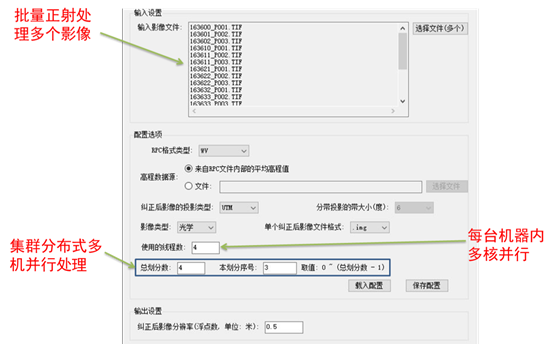
图13 卫星影像正射纠正步骤中高性能计算与批量处理
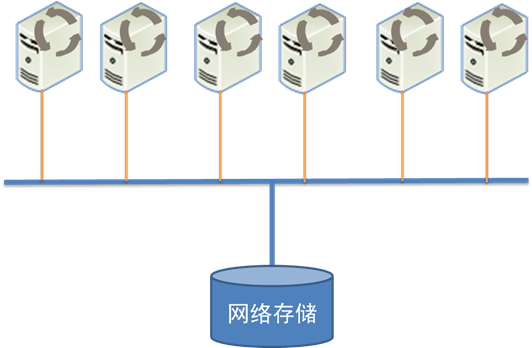
图14 网络环境下遥感数据存储与数据访问网络结构
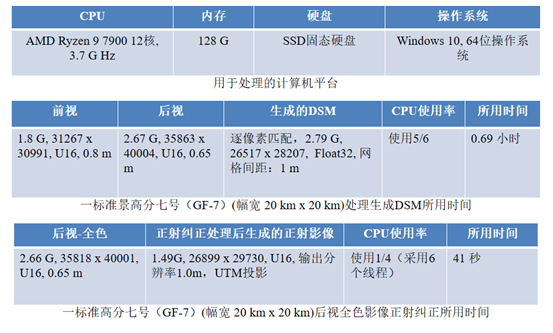
图15 单机平台下一标准景高分七号处理效率
(4)采用的多视立体匹配和多视融合技术
针对不同传感器获取影像的特点,MASI软件采用了两种立体匹配策略用于提高匹配完整度和三维点交会精度。针对无人机获取的影像重叠度高特点,采用多视立体匹配策略,一方面可减少遮挡影响,提高立体匹配的完整度,另一方面可实现最小二乘平差的三维点交会,提高点的交会精度。通过多视立体匹配策略的应用,匹配生成的DSM和点云不仅高程精度高而且点密度高。针对卫星影像、ADS航空三线阵影像和框幅式航空影像,采用多视融合技术,将多个双视觉立体匹配结果进行拼接融合,尽量消除遮挡区域或无值区域,在这些区域得到更多的三维点,另外在多个双视觉重叠区域因为具有冗余观测可通过一定的数值计算进一步提高点的高程精度。
针对无人机影像采用的多视立体匹配如图16所示,图17为无人机影像多视立体匹配得到的DSM结果,为建筑物房顶边缘和相邻地面区域,图中高度突变的房顶边缘的形态和细节清晰,较好地保持了建筑物边缘。
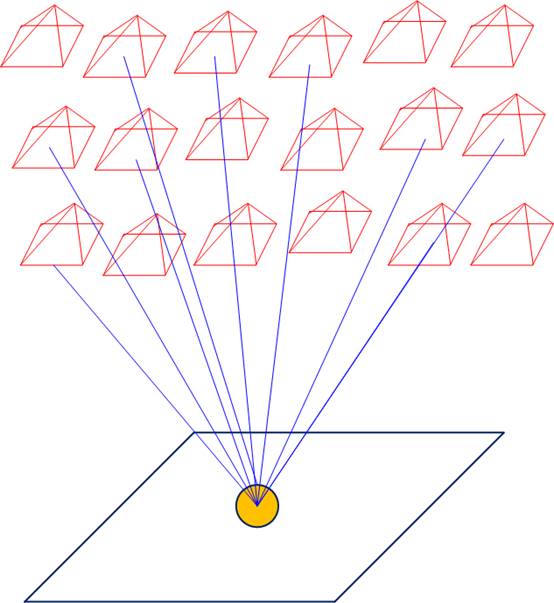
图16 无人机影像多视密集匹配及多视最小二乘精确交会

图17 无人机影像多视立体匹配得到的DSM(显示时高度值当成灰度值进行显示),高度突变的房顶边缘的形态和细节清晰
在MASI软件中,具备两种操作方法实现多视融合技术。一种方法为用户选择输出xyz格式的高密度点云文件,然后将同一区域不同立体配置生成的点云进行融合处理,生成精确度、密度更高的DSM。另一种提高DSM精度和密度融合方法为多个立体配置生成的多个DSM进行融合拼接处理,拼接后的DSM精确度、密度更高。前一种方法灵活性更强,可根据需要生成不同参数(如网格间距、空值和选择高度值方法等)的DSM;后一种方法处理效率更高。以上两种DSM融合处理方法可应用于卫星影像、ADS航空三线阵影像和框幅式航空影像生成高密度、高精度DSM。
以下以Pleiades NEO三视立体影像为例。本例中,为充分利用该数据集特点并演示多个立体组合匹配结果进行融合处理等操作过程,我们选择分别进行前视-后视立体、前视-下视立体、后视-下视立体三个组合的密集立体匹配,并对所得结果进行一个拼接融合处理。完成三个立体组合各自的立体匹配处理后,使用DSM拼接融合功能生成精度更高、完整度更高的DSM结果。图18为前视-后视立体匹配结果,图19为前视-下视立体匹配结果,图20为后视-下视立体匹配结果,图21为三个立体组合的拼接融合结果。各图中白色区域表示无点区域,图21显示,经拼接融合处理,无点区域变少。图21中结果非最终结果,经后处理(主要包括空值区域插值、错误点/小区域去除)后得到最终DSM结果。

图18 前视-后视立体匹配结果,白色区域表示无点区域

图19 前视-下视立体匹配结果,白色区域表示无点区域

图20 后视-下视立体匹配结果,白色区域表示无点区域

图21 三个立体组合的拼接融合结果,白色区域表示无点区域,融合结果无点区域变少。该结果非最终结果,经后处理(空值区域插值、错误点/小区域去除)后得到最终结果。
(5)高密度、高精度DSM生成及新型应用
具备多项前沿技术,既有可较好保持建筑物边缘的逐点密集匹配算法,又有针对高差起伏较大山区专门优化的立体匹配算法;软件同时具有多项生成高密度DSM的后处理技术,如空值区域插值、错误点(小区域)去除等。生成的DSM精度高、密度高(逐像素生成三维点)。图22 ~ 图25分别为框幅式航空影像、ADS三线阵推扫式航空影像、卫星影像和无人机影像生成的高密度、高精度DSM。
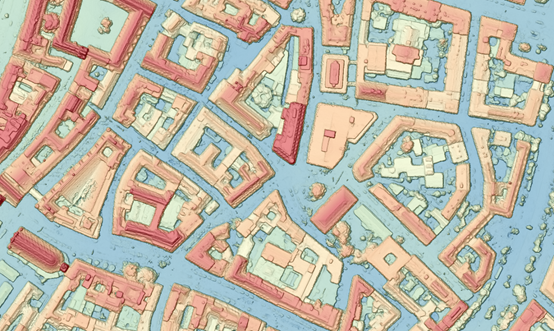
图22 框幅式航空影像逐像素生成的DSM,网格间距10 cm

图23 ADS三线阵推扫式航空影像逐像素生成的DSM,网格间距20 cm
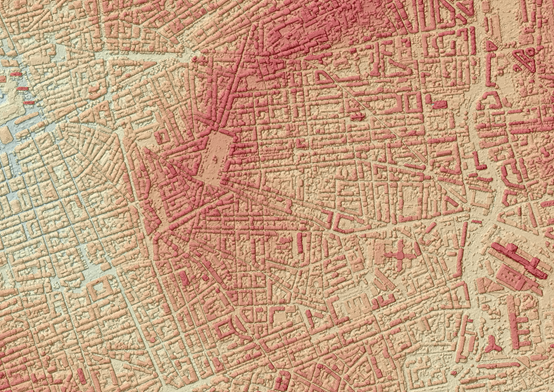
图24 Pleiades NEO三视立体卫星影像处理得到的DSM,网格间距50 cm

图25 无人机处理得到的DSM(道路转盘中植物盆景),网格间距5 cm
生成的高密度、高精度DSM可用于以下新型应用:
(a)建筑物高度提取与白模建模,如图26所示。
(b)基于高度变化的房屋变化自动发现,可应用于新建、违建、超建、加盖、拆除房屋自动发现及其高度的精确估算,在建房屋的进度监测及机场净空区超高建筑物自动发现,如图27所示。
(c)体积计算。使用DSM进行体积计算功能,并具备设置基面高度(相对基面体积)或者前一期DSM(相比前一期高度变化导致的体积)等两种方式计算体积,可用于土石方、地表矿产资源开采量、地面物体(货物、干散货、垃圾、木头、草垛等)堆积量等估算、蓄水量、打击评估等,如图28 ~ 图31所示。
(d)使用DSM或由DSM得到的DEM进行(真)正射影像制作,如图32所示。
(e)三维实景建模,如图33所示。

图26 国产高景一号立体像对自动提取的建筑物属性(楼高、楼层数、楼中心位置、地面面积和建筑面积等),建筑物底框矢量可来自第三方或者通过MASI软件采集,提取的建筑物属性自动添加至矢量文件;通过GIS平台三维可视化如上图。
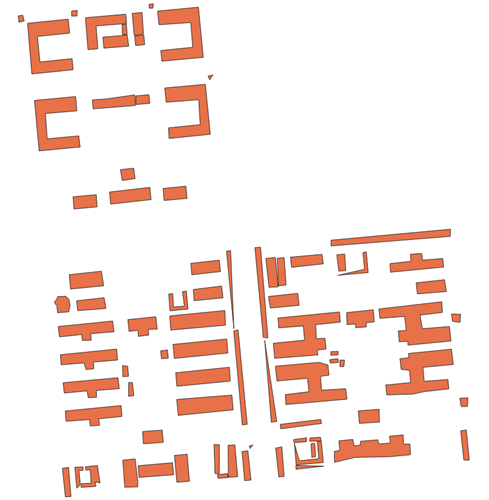
图27 根据高度变化图采集的新建房屋矢量图层,自动估算新建房屋的高度、中心位置、地面面积、楼层数、和建筑面积并自动添加为矢量文件属性

图28 生成的正射影像,用于体积计算过程中确定边界
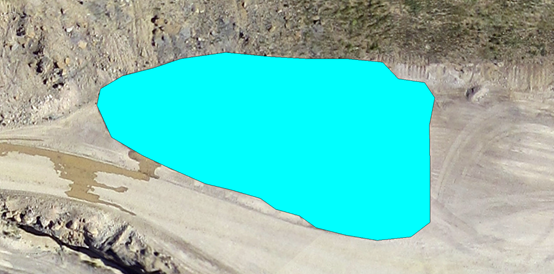
图29 在正射影像上勾画用于计算体积的多边形
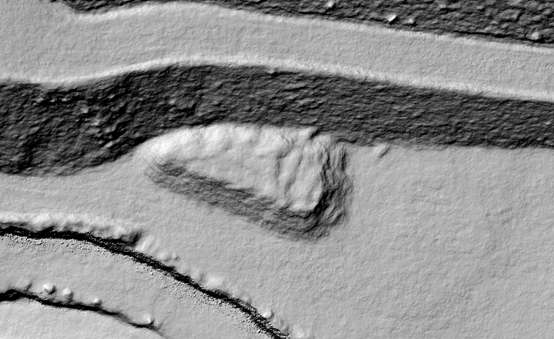
图30 生成的高精度、高密度DSM,用于体积数值计算
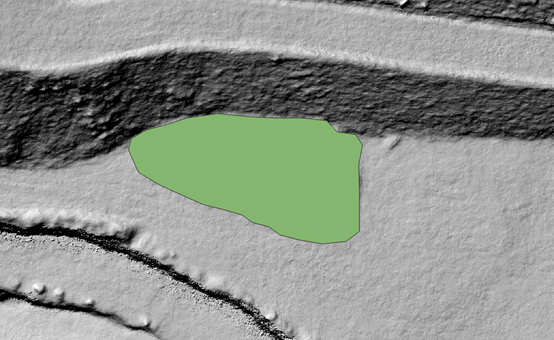
图31 应用DSM计算该多边形对应范围的体积。面积1106.00 m2,体积3659.30 m3

图32 Pléiades Neo 30 cm融合影像正射纠正结果,真彩色

图33 真实色彩纹理的三维模型,由Pléiades Neo 30 cm三视立体数据生成
(6)以点集中管理为特色的点查看、点量测通用交互式工具nViews
nViews.exe为交互式工具,可导入导出多重影像匹配的同名点,进行匹配点的正确性检查、像点量测(如在指定区域自动匹配新像点、手动添加像点并量测其像素坐标、选择像点、移动像点、删除像点、等等)、点分布查看、控制点导入和量测、大数量影像的高效查看等,并可根据控制点地面坐标自动推断像点位置,根据设置的重数(连接点的视数)显示点的分布等。该工具还可通过调用外部程序方式进行光束法区域网平差计算和使用检查点进行精度验证,生成定向几何精度报告等。nViews.exe可用于卫星影像立体区域网和平面区域网匹配的点的查看、检查和量测,其提供的各种操作功能即可满足指定区域精细建模目的的多角度多时相观测数据处理,又可符合大范围立体测绘和大区域平面制图目的的区域网平差要求。
设计和实现上述交互式工具之初,我们充分考虑软件操作的易用性和高效率,并且该工具需有良好通用性。我们从点文件格式,数据结构,处理流程和交互方式等进行全方位的重构,实现了以点集中管理为特色的交互式工具nViews.exe,所有操作以点为中心进行展开。该工具简单易用,高度自动且通用型强。
图34为进行点集中管理的主操作框架,所有的点存储在一个XML文件,导入点后可很方便进行点的管理,包括点的添加、删除、自动匹配新的连接点、导入控制点、导出点等。同时可对点进行各种查看、检查及其它操作,例如,图35为查看点分布情况,图36为检查像点在所在影像中位置,其操作为点击主操作框架下方像点显示区域中影像号(ImageID)。
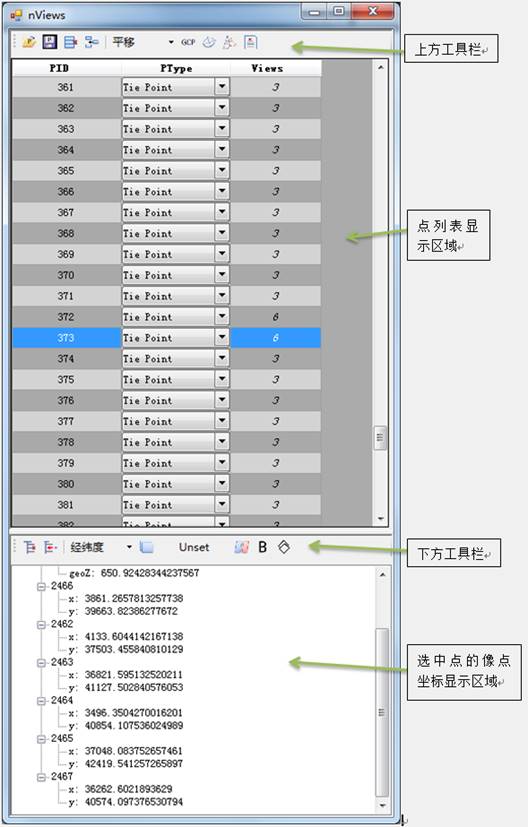
图34 以点集中管理为特色的交互式工具nViews.exe的主操作框架
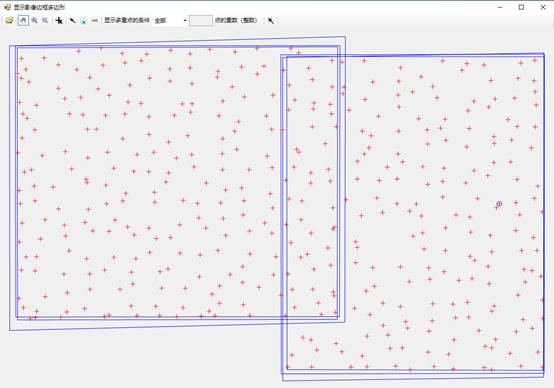
图35 查看点分布情况
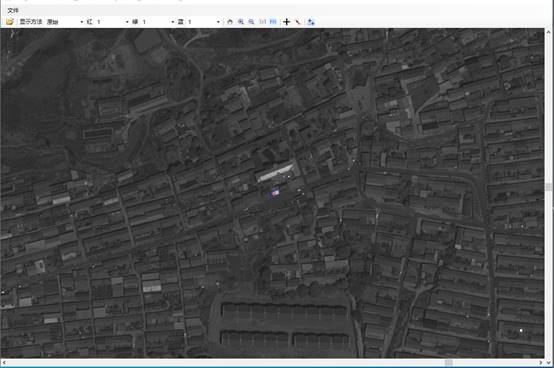
图36 点击主操作框架下方像点显示区域中影像号(ImageID)查看该像点在影像中位置